CannyБпдЕМьВтЫуЗЈЕФЪЕЯж
CannyдРэ
CannyЕФдРэОЭВЛЯИЫЕСЫЃЌИдШјРзЫЙЕФЁЖЪ§зжЭМЯёДІРэЁЗЃЈЕкШ§АцЃЉP463~465НВНтЕФБШНЯЧхГўЃЌжївЊОЭЫФИіВНжшЃК
1. ЖдЭМЯёНјааИпЫЙТЫВЈ
2. МЦЫуЬнЖШДѓаЁКЭЬнЖШЗНЯђ
3. ЖдЬнЖШЗљжЕЭМЯёНјааЗЧМЋДѓвжжЦ
4. ЫЋуажЕДІРэКЭСЌНгадЗжЮіЃЈЭЈГЃетвЛВНгыЗЧМЋДѓвжжЦВЂааЃЌЯъМћЯТУцЕФДњТыЃЉ
ЯТУцжиЕуЫЕвЛЯТЗЧМЋДѓвжжЦЁЃ
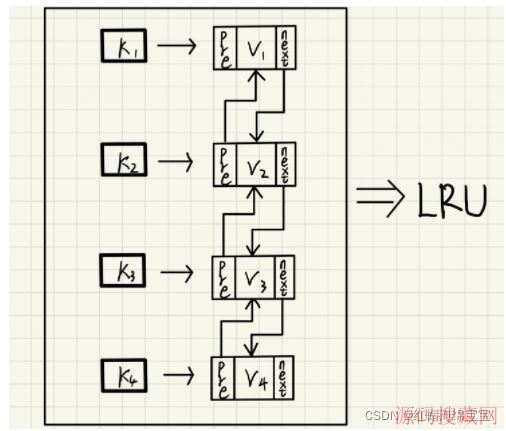
ЗЧМЋДѓвжжЦ
ЖдвЛЗљЭМЯёМЦЫуЬнЖШДѓаЁКЭЬнЖШЗНЯђКѓЃЌашвЊНјааЗЧМЋДѓвжжЦЃЌвЛАуЖМЪЧЭЈЙ§МЦЫуЬнЖШЗНЯђЃЌбизХЬнЖШЗНЯђЃЌХаЖЯИУЯёЫиЕуЕФЬнЖШДѓаЁЪЧЗёЪЧМЋДѓжЕЁЃетРяжївЊЫЕвЛЯТЗНЯђЕФХаЖЯЁЃ
ЭМЯёзјБъЯЕ
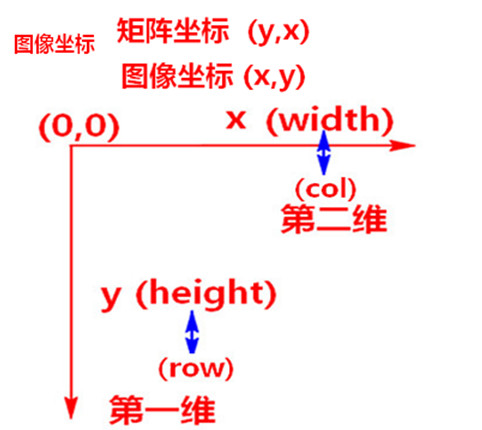
ЁЖЪ§зжЭМЯёДІРэЁЗЃЈЕкШ§АцЃЉетБОЪщжаЭМЯёзјБъЫГађгыЩЯЫпзјБъЯЕЪЧЯрЗДЕФЃЌВЛжЊЕРзїепЮЊЪВУДетУДаДЃЌгажЊЕРЕФХѓгбИцЫпЮввЛЯТЙўЃЌПДЪщЕФЪБКђЃЌзЂвтвЛЯТзјБъЕФЫГађЁЃ
ЭМЯёзјБъЯЕжаЃЌДгxжсе§ЗНЯђЭљyжсе§ЗНЯђа§зЊЮЊе§ЃЈЮвУЛгаВщЕНШЈЭўЮФЯззЪСЯЃЌВЛжЊЕРетОфЛАЖдВЛЖдЃЉЁЃ
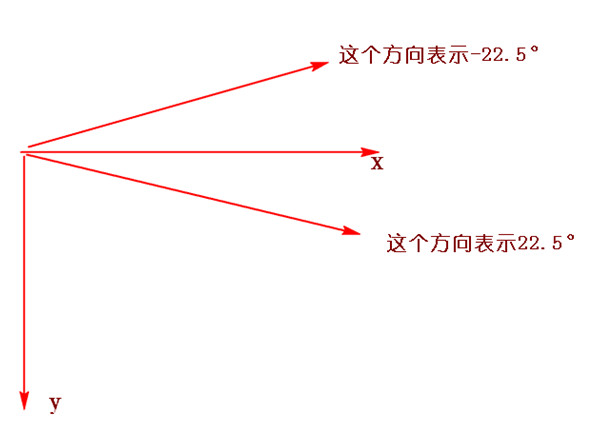
БпдЕЗНЯђЧјМф
ЗЧМЋДѓвжжЦжаЃЌЭЈГЃНЋБпдЕСПЛЏЮЊ4ИіЗНЯђЃЌЫЎЦНЃЌДЙжБЃЌ45ЁуКЭ-45ЁуЃЌЪЕМЪжаЃЌЭЈЙ§ЖЈвхвЛИіЗНЯђНЧЗНЮЛЃЌдкИУЗНЮЛФкШЯЮЊЪЧФГвЛЗНЯђЕФБпдЕЃЌЪЕЯжжаЃЌЮвУЧЭЈЙ§МЦЫуЬнЖШЗНЯђЕФЗЖЮЇДгЖјХаЖЯБпдЕЕФЗНЯђЃЈБпдЕЕФЗНЯђгыЬнЖШЗНЯђДЙжБЃЉЁЃ
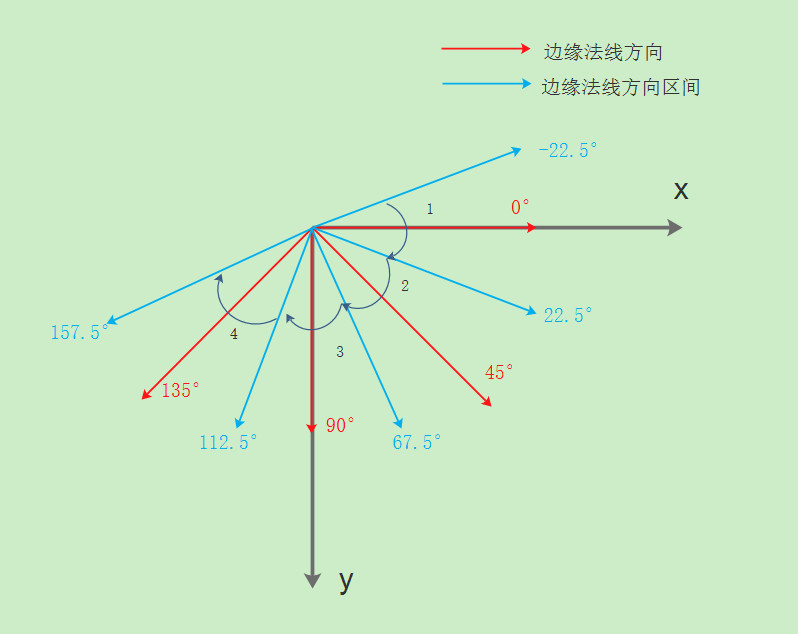
гЩгкБпдЕЗНЯђУЛгае§ИКЃЌЫљвдЬнЖШЗНЯђ
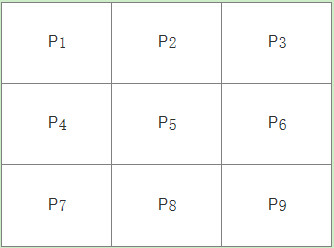
1. ЕБ
2. ЕБ
3. ЦфЫћСНИіЗНЯђвРДЮРрЭЦ
ЪЕЯжжаЃЌЭЈЙ§Ш§НЧКЏЪ§ЕФаджЪМЦЫуЃЌБШШчЕквЛжжЧщПіЃЌЪЙгУЯТУцЬѕМўРДХаЖЯ
Цфжа
ЦфЫћШ§жжЧщПіЖСепПЩвдздааЭЦЕМЁЃ
ХаЖЯГіЬнЖШЗНЯђКѓЃЌОЭПЩвдНјааЗЧМЋДѓжЕвжжЦСЫЁЃЛЙЪЧвдЕквЛжжЧщПіЮЊР§ЃЌБШШчЮвМЦЫуГіСЫP5етИіЯёЫиЕуДІЕФЬнЖШЗНЯђЮЊ0ЁуЃЌдђетИіЪБКђЃЌЮвУЧвЊХаЖЯЕФОЭЪЧM(P5)>M(P4)&&M(P5)>M(P6),вВОЭЪЧP5ЪЧЗёЪЧМЋДѓжЕЃЌЦфжаMБэЪОИУЯёЫиЕуЕФЬнЖШДѓаЁЁЃ
ЯТУцЪЧЮвИљОнЩЯУцЕФЗжЮіаДГіРДЕФCannyЕФЪЕЯж
CannyЫуЗЈЕФЪЕЯжЃЈ1.0АцЃЉ
#define CANNY_SHIFT 16
#define TAN_225 (int)(0.4142135623730950488016887242097*(1 << CANNY_SHIFT));
#define TAN_675 (int)(2.4142135623730950488016887242097*(1 << CANNY_SHIFT));
void Canny1(const Mat &srcImage, Mat &dstImage, double lowThreshold, double highThreshold, int sizeOfAperture, bool L2)
{
// жЛжЇГжЛвЖШЭМ
CV_Assert(srcImage.type() == CV_8UC1);
dstImage.create(srcImage.size(), srcImage.type());
// L2ЗЖЪ§МЦЫуБпдЕЧПЖШЕФЪБКђЃЌОрРыВЩгУЦНЗНЕФЗНЪНЃЌЫљвдуажЕвВашвЊВЩгУЦНЗН
if (L2)
{
lowThreshold = std::min(32767.0, lowThreshold);
highThreshold = std::min(32767.0, highThreshold);
if (lowThreshold > 0) lowThreshold *= lowThreshold;
if (highThreshold > 0) highThreshold *= highThreshold;
}
// МЦЫуfx,fy,ЧПЖШЭМ
Mat fx(srcImage.size(), CV_32SC1);
Mat fy(srcImage.size(), CV_32SC1);
Mat enlargedImage;
Mat magnitudeImage(srcImage.rows + 2, srcImage.cols + 2, CV_32SC1);
magnitudeImage.setTo(Scalar(0));
copyMakeBorder(srcImage, enlargedImage, 1, 1, 1, 1, cv::BORDER_REPLICATE);
int stepOfEnlargedImage = enlargedImage.cols;
int stepOffx = fx.cols;
int height = srcImage.rows;
int width = srcImage.cols;
uchar *rowOfEnlargedImage = enlargedImage.data + stepOfEnlargedImage + 1;
int *rowOffx = (int *)fx.data;
int *rowOffy = (int *)fy.data;
int *rowOfMagnitudeImage = (int *)magnitudeImage.data + stepOfEnlargedImage + 1;
for (int y = 0; y <= height - 1; ++y, rowOfEnlargedImage += stepOfEnlargedImage, rowOfMagnitudeImage += stepOfEnlargedImage, rowOffx += stepOffx, rowOffy += stepOffx)
{
uchar *colOfEnlargedImage = rowOfEnlargedImage;
int *colOffx = rowOffx;
int *colOffy = rowOffy;
int *colOfMagnitudeImage = rowOfMagnitudeImage;
for (int x = 0; x <= width - 1; ++x, ++colOfEnlargedImage, ++colOffx, ++colOffy, ++colOfMagnitudeImage)
{
// fx
colOffx[0] = colOfEnlargedImage[1 - stepOfEnlargedImage] + 2 * colOfEnlargedImage[1] + colOfEnlargedImage[1 + stepOfEnlargedImage] -
colOfEnlargedImage[-1 - stepOfEnlargedImage] - 2 * colOfEnlargedImage[-1] - colOfEnlargedImage[-1 + stepOfEnlargedImage];
// fy
colOffy[0] = colOfEnlargedImage[stepOfEnlargedImage - 1] + 2 * colOfEnlargedImage[stepOfEnlargedImage] + colOfEnlargedImage[stepOfEnlargedImage + 1] -
colOfEnlargedImage[-stepOfEnlargedImage - 1] - 2 * colOfEnlargedImage[-stepOfEnlargedImage] - colOfEnlargedImage[-stepOfEnlargedImage + 1];
// МЦЫуБпдЕЧПЖШЃЌгЩгкжЛЪЧгУгкБШНЯЃЌЮЊСЫМгПьЫйЖШЃЌжЛМЦЫуЦНЗНКЭ
if (L2)
{
colOfMagnitudeImage[0] = colOffx[0] * colOffx[0] + colOffy[0] * colOffy[0];
}
else
{
colOfMagnitudeImage[0] = std::abs(colOffx[0]) + std::abs(colOffy[0]);
}
}
}
// ЗЧМЋДѓвжжЦЃЌЭЌЪББъМЧЭМзіБъМЧ,ЫЋуажЕДІРэ
// 0 - ПЩФмЪЧБпдЕ
// 1 - ВЛЪЧБпдЕ
// 2 - вЛЖЈЪЧБпдЕ
Mat labelImage(srcImage.rows + 2, srcImage.cols + 2, CV_8UC1);
memset(labelImage.data, 1, labelImage.rows*labelImage.cols);
rowOffx = (int *)fx.data;
rowOffy = (int *)fy.data;
rowOfMagnitudeImage = (int *)magnitudeImage.data + stepOfEnlargedImage + 1;
uchar *rowOfLabelImage = labelImage.data + stepOfEnlargedImage + 1;
queue<uchar*> queueOfEdgePixel;
for (int y = 0; y <= height - 1; ++y, rowOfMagnitudeImage += stepOfEnlargedImage, rowOffx += stepOffx, rowOffy += stepOffx, rowOfLabelImage += stepOfEnlargedImage)
{
int *colOffx = rowOffx;
int *colOffy = rowOffy;
int *colOfMagnitudeImage = rowOfMagnitudeImage;
uchar *colOfLabelImage = rowOfLabelImage;
for (int x = 0; x <= width - 1; ++x, ++colOffx, ++colOffy, ++colOfMagnitudeImage, ++colOfLabelImage)
{
int fx = colOffx[0];
int fy = colOffy[0];
// ИУЯёЫиЕуВХгаПЩФмЪЧБпдЕЕу
if (colOfMagnitudeImage[0] > lowThreshold)
{
// ЗЧМЋДѓвжжЦ
fy = fy*(1 << CANNY_SHIFT);
int tan225 = fx * TAN_225;
int tan675 = fx * TAN_675;
// ЬнЖШЗНЯђ0
if (fy>-1 * tan225 && fy < tan225)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] >= colOfMagnitudeImage[-1] && colOfMagnitudeImage[0] >= colOfMagnitudeImage[1])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
// ЬнЖШЗНЯђ45
if (fy >= tan225&&fy <= tan675)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] > colOfMagnitudeImage[stepOfEnlargedImage + 1] && colOfMagnitudeImage[0] > colOfMagnitudeImage[-stepOfEnlargedImage - 1])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
// ЬнЖШЗНЯђ90
if (fy>tan675 || fy<-tan675)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] >= colOfMagnitudeImage[stepOfEnlargedImage] && colOfMagnitudeImage[0] >= colOfMagnitudeImage[-stepOfEnlargedImage])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
// ЬнЖШЗНЯђ135
if (fy >= -1 * tan675&&fy <= -1 * tan225)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] > colOfMagnitudeImage[stepOfEnlargedImage - 1] && colOfMagnitudeImage[0] > colOfMagnitudeImage[-stepOfEnlargedImage + 1])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
}
}
}
// СЌНгадЗжЮі,етРяВЩгУЖгСаЪЕЯжЃЈЙуЖШгХЯШБщРњЃЉ
// СЌНгадЗжЮівВПЩвдВЩгУеЛЪЕЯж(ЩюЖШгХЯШБщРњЃЌOpenCVЕФзіЗЈ)
while (!queueOfEdgePixel.empty())
{
uchar *m = queueOfEdgePixel.front();
queueOfEdgePixel.pop();
// дк8СьгђЫбЫї
if (!m[-1])
{
m[-1] = 2;
queueOfEdgePixel.push(m - 1);
}
if (!m[1])
{
m[1] = 2;
queueOfEdgePixel.push(m + 1);
}
if (!m[-stepOfEnlargedImage - 1])
{
m[-stepOfEnlargedImage - 1] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage - 1);
}
if (!m[-stepOfEnlargedImage])
{
m[-stepOfEnlargedImage] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage);
}
if (!m[-stepOfEnlargedImage + 1])
{
m[-stepOfEnlargedImage + 1] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage + 1);
}
if (!m[stepOfEnlargedImage - 1])
{
m[stepOfEnlargedImage - 1] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage - 1);
}
if (!m[stepOfEnlargedImage])
{
m[stepOfEnlargedImage] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage);
}
if (!m[stepOfEnlargedImage + 1])
{
m[stepOfEnlargedImage + 1] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage + 1);
}
}
// зюКѓЩњГЩБпдЕЭМ
rowOfLabelImage = labelImage.data + stepOfEnlargedImage + 1;
uchar *rowOfDst = dstImage.data;
for (int y = 0; y <= height - 1; ++y, rowOfLabelImage += stepOfEnlargedImage, rowOfDst += stepOffx)
{
uchar *colOfLabelImage = rowOfLabelImage;
uchar *colOfDst = rowOfDst;
for (int x = 0; x <= width - 1; ++x, ++colOfDst, ++colOfLabelImage)
{
if (colOfLabelImage[0] == 2)
colOfDst[0] = 255;
else
{
colOfDst[0] = 0;
}
}
}
}CannyЫуЗЈЕФЪЕЯж(2.0Ац)
ЮвПДСЫOpenCVдДТыжЎКѓЃЌНЋНЧЖШЕФХаЖЯаоИФЮЊOpenCVЕФЗНЪН.
void Canny2(const Mat &srcImage, Mat &dstImage, double lowThreshold, double highThreshold, int sizeOfAperture, bool L2)
{
// жЛжЇГжЛвЖШЭМ
CV_Assert(srcImage.type() == CV_8UC1);
dstImage.create(srcImage.size(), srcImage.type());
// L2ЗЖЪ§МЦЫуБпдЕЧПЖШЕФЪБКђЃЌОрРыВЩгУЦНЗНЕФЗНЪНЃЌЫљвдуажЕвВашвЊВЩгУЦНЗН
if (L2)
{
lowThreshold = std::min(32767.0, lowThreshold);
highThreshold = std::min(32767.0, highThreshold);
if (lowThreshold > 0) lowThreshold *= lowThreshold;
if (highThreshold > 0) highThreshold *= highThreshold;
}
// МЦЫуfx,fy,ЧПЖШЭМ
Mat fx(srcImage.size(), CV_32SC1);
Mat fy(srcImage.size(), CV_32SC1);
Mat enlargedImage;
Mat magnitudeImage(srcImage.rows + 2, srcImage.cols + 2, CV_32SC1);
magnitudeImage.setTo(Scalar(0));
copyMakeBorder(srcImage, enlargedImage, 1, 1, 1, 1, cv::BORDER_REPLICATE);
int stepOfEnlargedImage = enlargedImage.cols;
int stepOffx = fx.cols;
int height = srcImage.rows;
int width = srcImage.cols;
uchar *rowOfEnlargedImage = enlargedImage.data + stepOfEnlargedImage + 1;
int *rowOffx = (int *)fx.data;
int *rowOffy = (int *)fy.data;
int *rowOfMagnitudeImage = (int *)magnitudeImage.data + stepOfEnlargedImage + 1;
for (int y = 0; y <= height - 1; ++y, rowOfEnlargedImage += stepOfEnlargedImage, rowOfMagnitudeImage += stepOfEnlargedImage, rowOffx += stepOffx, rowOffy += stepOffx)
{
uchar *colOfEnlargedImage = rowOfEnlargedImage;
int *colOffx = rowOffx;
int *colOffy = rowOffy;
int *colOfMagnitudeImage = rowOfMagnitudeImage;
for (int x = 0; x <= width - 1; ++x, ++colOfEnlargedImage, ++colOffx, ++colOffy, ++colOfMagnitudeImage)
{
// fx
colOffx[0] = colOfEnlargedImage[1 - stepOfEnlargedImage] + 2 * colOfEnlargedImage[1] + colOfEnlargedImage[1 + stepOfEnlargedImage] -
colOfEnlargedImage[-1 - stepOfEnlargedImage] - 2 * colOfEnlargedImage[-1] - colOfEnlargedImage[-1 + stepOfEnlargedImage];
// fy
colOffy[0] = colOfEnlargedImage[stepOfEnlargedImage - 1] + 2 * colOfEnlargedImage[stepOfEnlargedImage] + colOfEnlargedImage[stepOfEnlargedImage + 1] -
colOfEnlargedImage[-stepOfEnlargedImage - 1] - 2 * colOfEnlargedImage[-stepOfEnlargedImage] - colOfEnlargedImage[-stepOfEnlargedImage + 1];
// МЦЫуБпдЕЧПЖШЃЌгЩгкжЛЪЧгУгкБШНЯЃЌЮЊСЫМгПьЫйЖШЃЌжЛМЦЫуЦНЗНКЭ
if (L2)
{
colOfMagnitudeImage[0] = colOffx[0] * colOffx[0] + colOffy[0] * colOffy[0];
}
else
{
colOfMagnitudeImage[0] = std::abs(colOffx[0]) + std::abs(colOffy[0]);
}
}
}
#define CANNY_SHIFT 15
#define TG22 (int)(0.4142135623730950488016887242097*(1 << CANNY_SHIFT) + 0.5);
// БщРњЧПЖШЭМЃЌМЦЫуНЧЖШЃЌВЂЪЙгУЗЧМЋДѓвжжЦЃЌЭЌЪББъМЧЭМзіБъМЧ
// 0 - ПЩФмЪЧБпдЕ
// 1 - ВЛЪЧБпдЕ
// 2 - вЛЖЈЪЧБпдЕ
Mat labelImage(srcImage.rows + 2, srcImage.cols + 2, CV_8UC1);
memset(labelImage.data, 1, labelImage.rows*labelImage.cols);
rowOffx = (int *)fx.data;
rowOffy = (int *)fy.data;
rowOfMagnitudeImage = (int *)magnitudeImage.data + stepOfEnlargedImage + 1;
uchar *rowOfLabelImage = labelImage.data + stepOfEnlargedImage + 1;
queue<uchar*> queueOfEdgePixel;
for (int y = 0; y <= height - 1; ++y, rowOfMagnitudeImage += stepOfEnlargedImage, rowOffx += stepOffx, rowOffy += stepOffx, rowOfLabelImage += stepOfEnlargedImage)
{
int *colOffx = rowOffx;
int *colOffy = rowOffy;
int *colOfMagnitudeImage = rowOfMagnitudeImage;
uchar *colOfLabelImage = rowOfLabelImage;
for (int x = 0; x <= width - 1; ++x, ++colOffx, ++colOffy, ++colOfMagnitudeImage, ++colOfLabelImage)
{
int xs = colOffx[0];
int ys = colOffy[0];
// ИУЯёЫиЕуВХгаПЩФмЪЧБпдЕЕу
if (colOfMagnitudeImage[0] > lowThreshold)
{
// ЗЧМЋДѓвжжЦ
int x = std::abs(xs);
int y = std::abs(ys) << CANNY_SHIFT;
int tg22x = x * TG22;
// ЬнЖШЗНЯђ0
// |dy|/|dx|<0.414,МЦЫуГіРД-22.5<theta<22.5
if (y < tg22x)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] > colOfMagnitudeImage[-1] && colOfMagnitudeImage[0] >= colOfMagnitudeImage[1])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = uchar(2);
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
else
{
// ЬнЖШЗНЯђ90
int tg67x = tg22x + (x << (CANNY_SHIFT + 1));
// ЫЎЦНБпдЕ|dy|/|dx|>tan67.5=2.414,зЂвтtanКЏЪ§ЧњЯпМЦЫуГіРД67.5<theta<112.5
if (y > tg67x)
{
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] > colOfMagnitudeImage[stepOfEnlargedImage] && colOfMagnitudeImage[0] >= colOfMagnitudeImage[-stepOfEnlargedImage])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
else
{
// ЬнЖШЗНЯђ +45Ёу/-45Ёу
int s = (xs ^ ys) < 0 -1 : 1;// ^:вьЛђ
// МЋДѓжЕЃЌгаПЩФмЪЧБпдЕ
if (colOfMagnitudeImage[0] > colOfMagnitudeImage[-stepOfEnlargedImage - s] && colOfMagnitudeImage[0] > colOfMagnitudeImage[stepOfEnlargedImage + s])
{
// ДѓгкИпуажЕЃЌЪЧБпдЕЃЌБъМЧЮЊ2
if (colOfMagnitudeImage[0] > highThreshold)
{
// НјШыЖгСаЃЌВЂЩшжУБъМЧ
colOfLabelImage[0] = 2;
queueOfEdgePixel.push(colOfLabelImage);
}
else
{
// гаПЩФмЪЧБпдЕЃЌБъМЧЮЊ0
colOfLabelImage[0] = 0;
}
}
}
}
}
}
}
// СЌНгадЗжЮі,етРяВЩгУЖгСаЪЕЯжЃЈЙуЖШгХЯШБщРњЃЉ
// СЌНгадЗжЮівВПЩвдВЩгУеЛЪЕЯж(ЩюЖШгХЯШБщРњЃЌOpenCVЕФзіЗЈ)
while (!queueOfEdgePixel.empty())
{
uchar *m = queueOfEdgePixel.front();
queueOfEdgePixel.pop();
// дк8СьгђЫбЫї
if (!m[-1])
{
m[-1] = 2;
queueOfEdgePixel.push(m - 1);
}
if (!m[1])
{
m[1] = 2;
queueOfEdgePixel.push(m + 1);
}
if (!m[-stepOfEnlargedImage - 1])
{
m[-stepOfEnlargedImage - 1] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage - 1);
}
if (!m[-stepOfEnlargedImage])
{
m[-stepOfEnlargedImage] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage);
}
if (!m[-stepOfEnlargedImage + 1])
{
m[-stepOfEnlargedImage + 1] = 2;
queueOfEdgePixel.push(m - stepOfEnlargedImage + 1);
}
if (!m[stepOfEnlargedImage - 1])
{
m[stepOfEnlargedImage - 1] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage - 1);
}
if (!m[stepOfEnlargedImage])
{
m[stepOfEnlargedImage] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage);
}
if (!m[stepOfEnlargedImage + 1])
{
m[stepOfEnlargedImage + 1] = 2;
queueOfEdgePixel.push(m + stepOfEnlargedImage + 1);
}
}
// зюКѓЩњГЩБпдЕЭМ
rowOfLabelImage = labelImage.data + stepOfEnlargedImage + 1;
uchar *rowOfDst = dstImage.data;
for (int y = 0; y <= height - 1; ++y, rowOfLabelImage += stepOfEnlargedImage, rowOfDst += stepOffx)
{
uchar *colOfLabelImage = rowOfLabelImage;
uchar *colOfDst = rowOfDst;
for (int x = 0; x <= width - 1; ++x, ++colOfDst, ++colOfLabelImage)
{
if (colOfLabelImage[0] == 2)
colOfDst[0] = 255;
else
{
colOfDst[0] = 0;
}
}
}
}ЪЕбщНсЙћ
ЪЕбщДњТы
int main(int argc, char *argv[])
{
Mat srcImage = imread("D:/Image/Gray/Lena512.bmp", -1);
Mat canny1,canny,canny2,canny3;
Canny1(srcImage, canny1, 50, 150, 3, false);
Canny2(srcImage, canny2, 50, 150, 3, false);
Canny(srcImage, canny, 50, 150);
imwrite("D:/Canny.bmp", canny);
imwrite("D:/Canny1.bmp", canny1);
imwrite("D:/Canny2.bmp", canny2);
return 0;
}ЪЙгУЕФЪЧБъзМЕФLenaЭМ

OpenCV ЕФДІРэНсЙћЮЊЃК
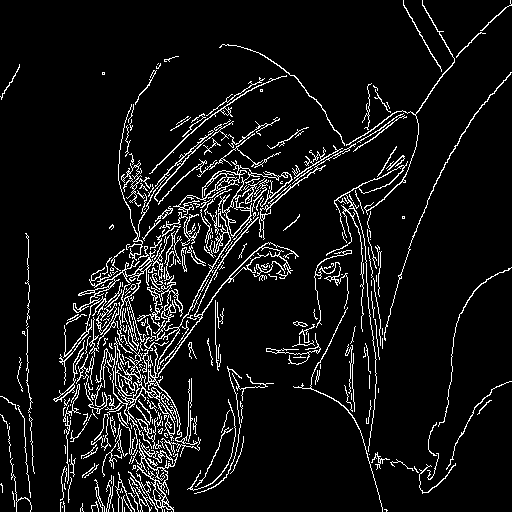
Canny2 ЗНЗЈЕФНсЙћ:

Canny1 ЗНЗЈЕФНсЙћ:

НсЙћБэУїЃЌOpenCVЕФЗНЪНаЇЙћБШздМКЪЕЯжЕФвЊКУЃЌОпЬхдвђЛЙВЛЬЋЧхГўЃЌЯЃЭћжЊЕРЕФХѓгбФмСєбдЃЌВЛЪЄИаМЄЁЃ
2016-6-19 01:54:58
- ЖЅ
- 0
- ВШ
- 0
excelдѕУДЙиСЊСНИіБэдѕбљНЋСНИіБэИёЙиСЊЪ§
Windows10ЯЕЭГжаАВзАRational Rose
yershopЩЬГЧЯЕЭГПЊЗЂвЛЁЊЁЊthinkphpКЭoneth
013--FloydЫуЗЈ-ЖЏЬЌЙцЛЎ-ЁЖЫуЗЈЩшМЦММЧЩгы
НтОіVisual Studio 2010ЯТTFSЗўЮёЮоЗЈСЌНг
ЭМТлЃЈЖўЃЉЃКЭМЕФЫФжжзюЖЬТЗОЖЫуЗЈ
JavaжЎФкВПРрСДНгЕНЭтВПРрЃЈЭтЮЇРрЃЉЯъНтЃЈ
ШэМўЙЄГЬдФЖСХХаа
-
-
Windows10ЯЕЭГжаАВзАRational Rose
2016-06-06
-

2013-05-06
-

-

-
НтОіVisual Studio 2010ЯТTFSЗўЮёЮоЗЈСЌНгЮЪЬт
2014-05-30
-
ЭМТлЃЈЖўЃЉЃКЭМЕФЫФжжзюЖЬТЗОЖЫуЗЈ
2016-06-06
-
2013-05-06
зюаТЮФеТ
-

2022-03-16
-
shellНХБОШчКЮЖСШЁpropertiesЮФМўжаЕФжЕ
2022-03-16
-

2022-03-16
-

RedisжЎRedisTemplateХфжУЗНЪН(ађСаКЭЗДађСаЛЏ)
2022-03-16
-
2022-03-16
-
2022-03-16
-
redisВПЪ№МАИїжжЪ§ОнРраЭЪЙгУУќСюЯъНт
2022-03-16
-

ШШУХдДТы